Optimal Control
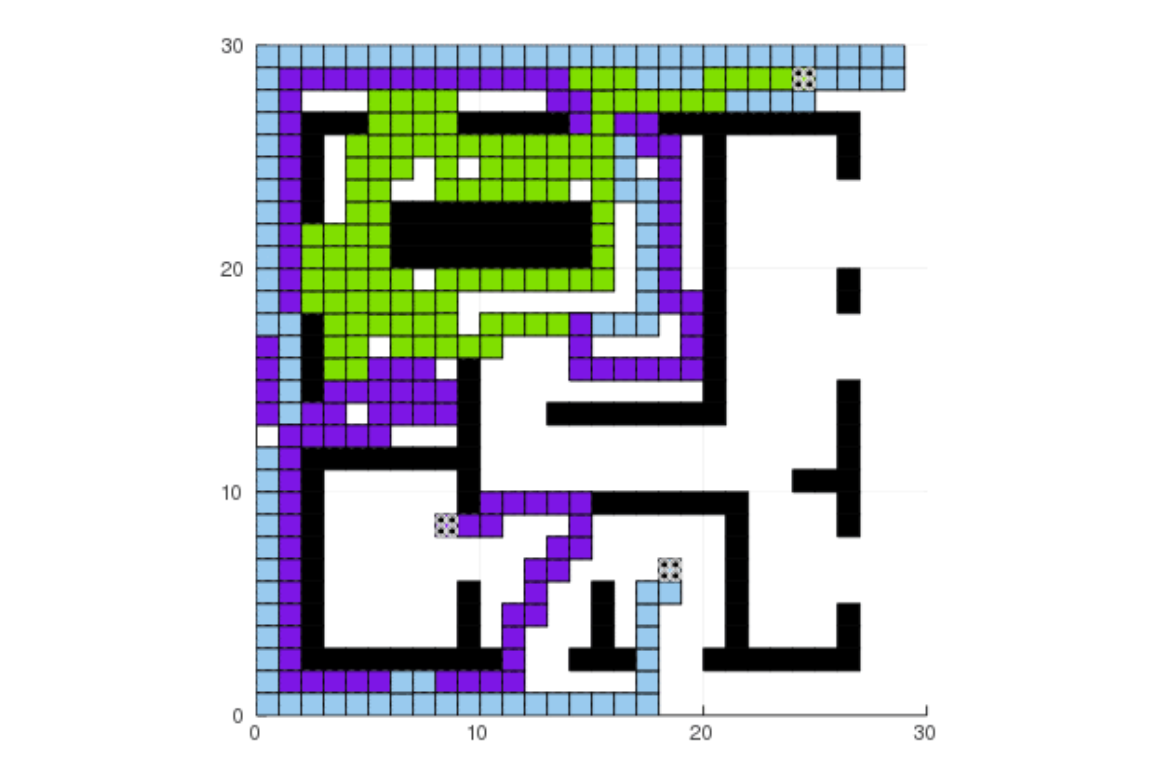
To implement concepts covered in my Optimal Controls course, a classmate and I developed a project based on multi-agent exploration. We formulated this problem as a Markov Decision Process, and used the Monte Carlo Tree Search method as an online solution for generating policies. The image below is an example of our algorithm being used in the scenario of multiple drones exploring an indoor environment. Specific objectives can be tuned, but in general the goal is to quickly explore as much of the environment as possible.