Soft Robotics
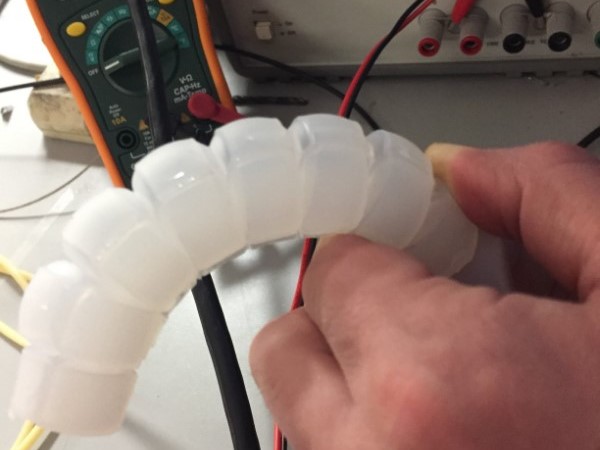
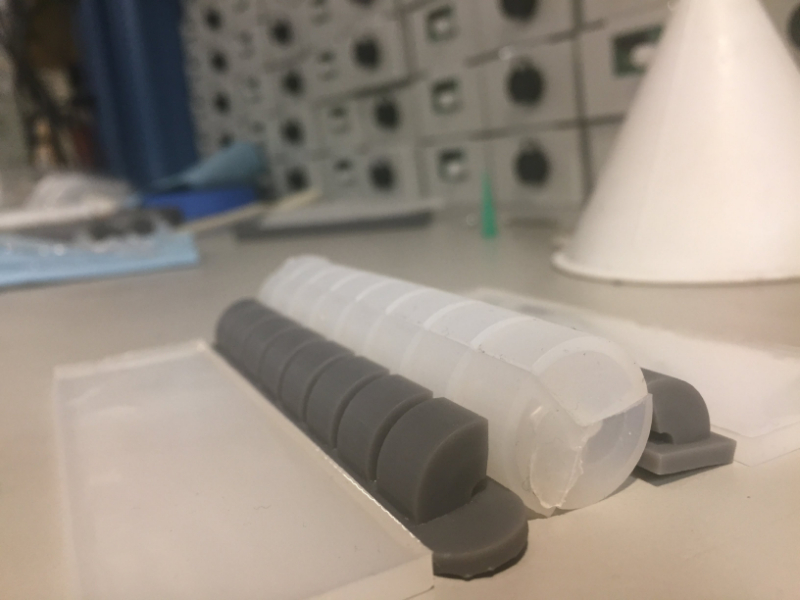
At the MIT Media Lab, I developed a proof-of-concept actuator for the locomotion of a pneumatic, bio-inspired epidermal soft robot. This type of robot is able to traverse the surface of human skin and can be utilized for medical applications. My contributions were prototyping a silicone actuator capable of bending in 3 directions, developing the fabrication methods, and implementing the electronic controls.