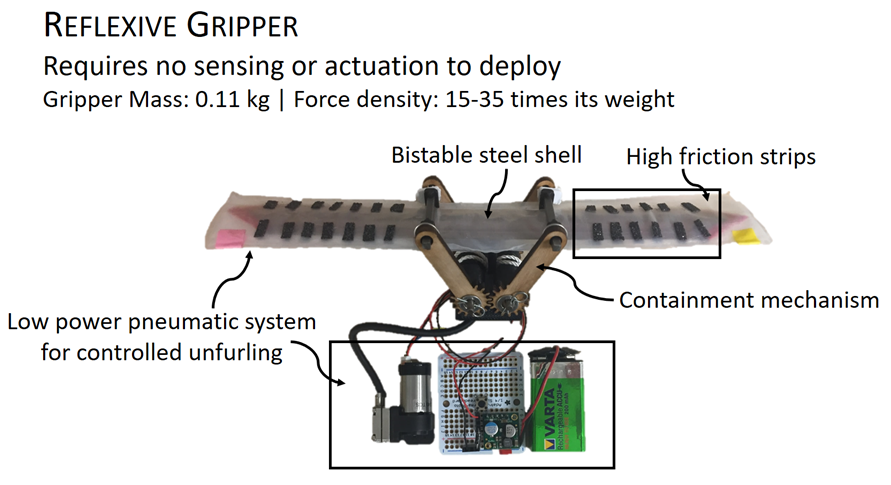
Gripper for Mobile Robots
As a NSF Undergraduate Research Fellow, I developed a reflexive, lightweight gripper featuring a high force density and rapid activation. I led the project from concept phase to a working prototype which carried 15-35 times its weight and actuated in 0.12 seconds. Additionally, I was first author for a conference paper and presented my work at the 2019 IEEE International Conference on Robotics and Automation (ICRA).