Real-time Dynamics Simulator
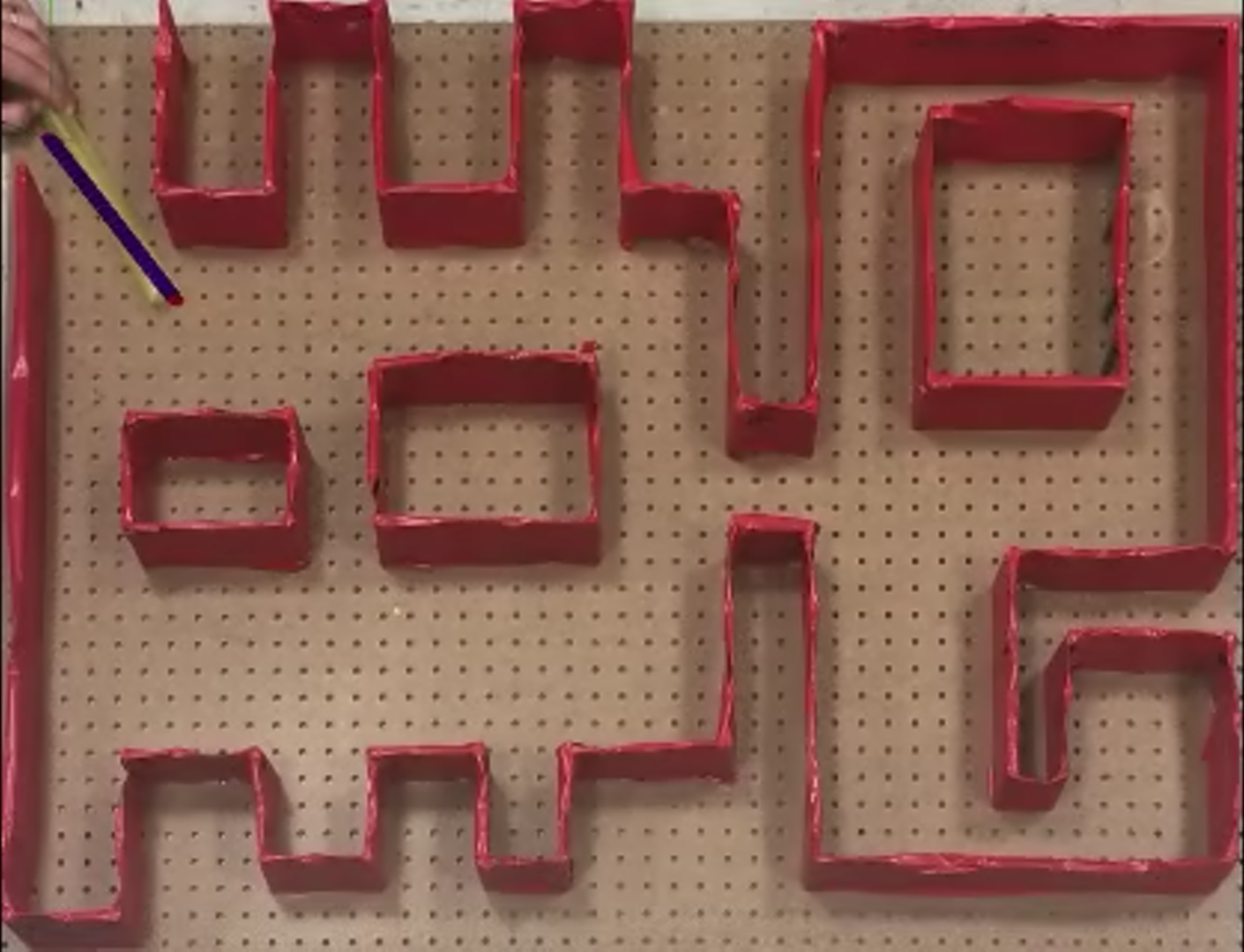
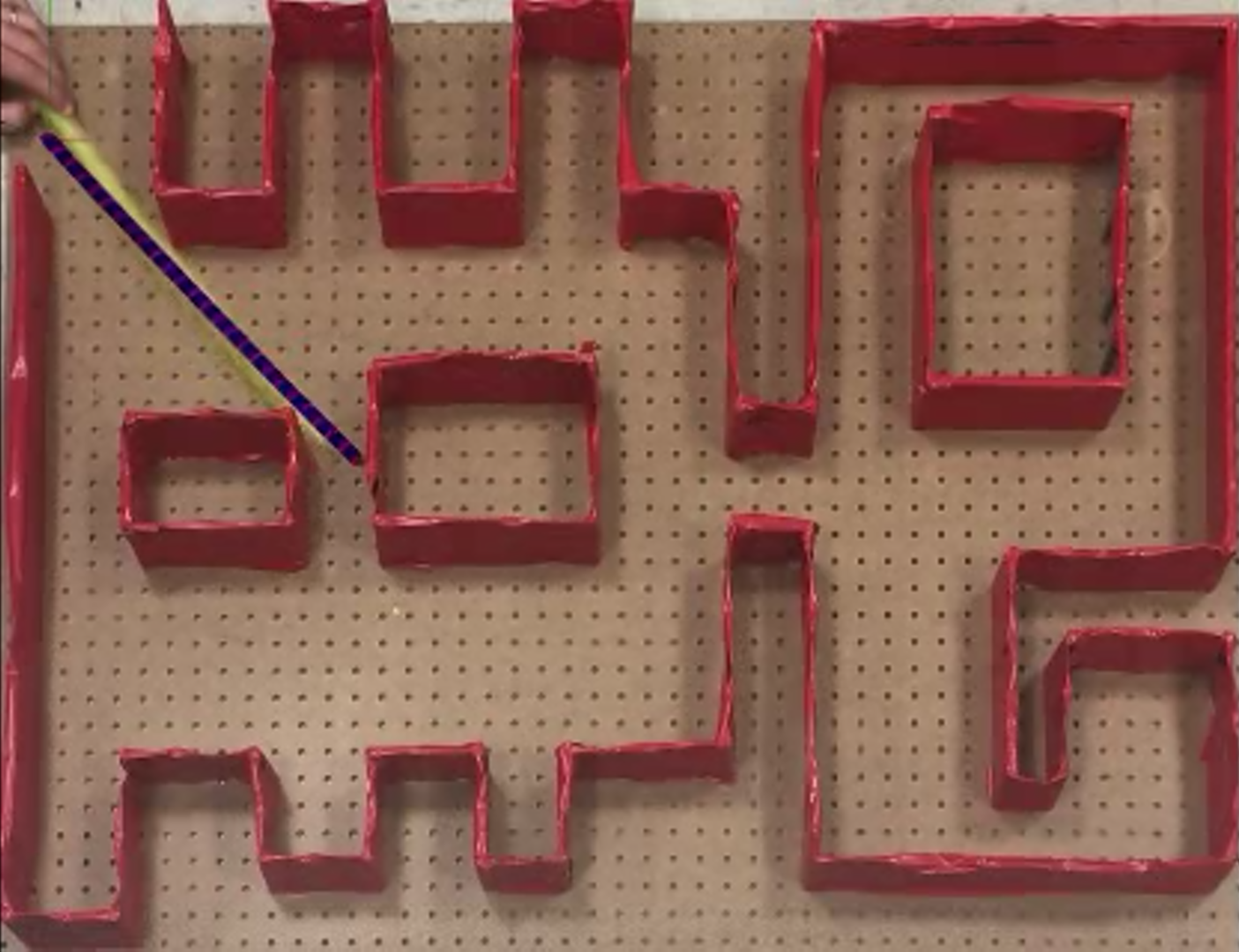
During my first year in graduate school, I developed a dynamics simulator for soft growing robots that captures general behaviors, handles robot-object interactions, and runs faster than real-time. The simulator uses a simplified multi-link rigid body model with contact constraints. To narrow the sim-to-real gap, I also designed methods for fitting model parameters based on video data of a robot in motion. The images below show the qualitative agreement between simulated and real robot trajectories.