Robotics: Science and Systems
In a project-based course, teams implemented a wide range of skills essential to robotics. The course covered content including dynamics and control, vision and sensing, localization and SLAM, as well as path planning and decision-making. Projects were executed both in simulation with ROS as well as on a physical system: a miniature vehicle equipped with a camera, LIDAR, and odometry instrumentation. By the end of the semester, our team developed algorithms that enabled the vehicle to successfully navigate around the basement hallways in a time-based challenge, as well as navigate in a small scale traffic system.


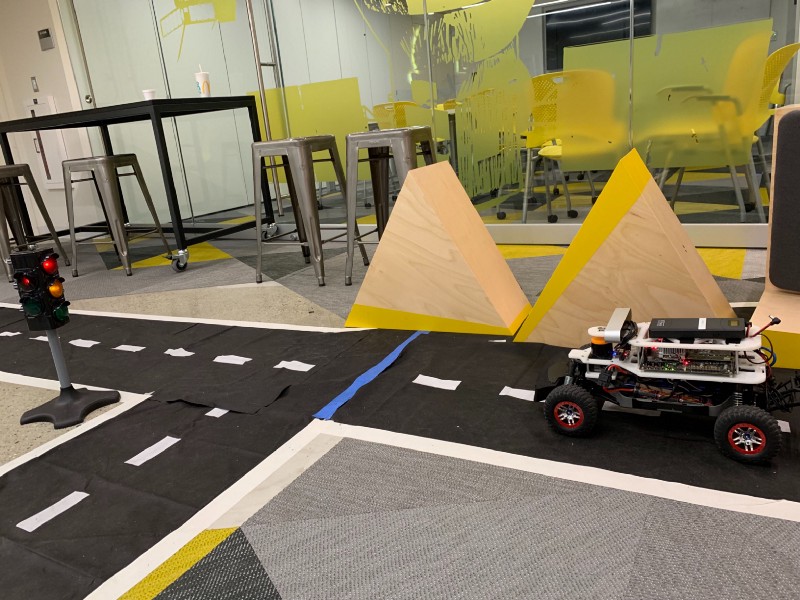

Below are some of the capabilities implemented during labs in this course:
Wall Following:
Vehicle Dynamics
PID Controls
Vision and Visual Servoing:
Line following via color segmentation
Transforming pixels to a plane via homography
Object detection with You Only Look Once (YOLO) algorithm paired with the Common Objects in Context (COCO) dataset
Localization & SLAM:
Motion and sensor model
Proprioception based on odometry
Monte carlo localization (particle filter)
Planning & Trajectory Following:
Search based A*
Sample based rapidly-exploring random trees (RRT)